


想从零开始征服VEX机器人州赛?这条从认知到夺冠的进阶路线,带你解锁技术与实战的双重突破!
一、入门:建立机器人思维基础
吃透赛事规则
研究VEX IQ官方手册,明确比赛主题(如物料搬运、迷宫挑战)、得分规则和禁用操作。观看往届州赛视频,分析冠军队伍的机械设计逻辑与程序策略。
搭建与编程起步
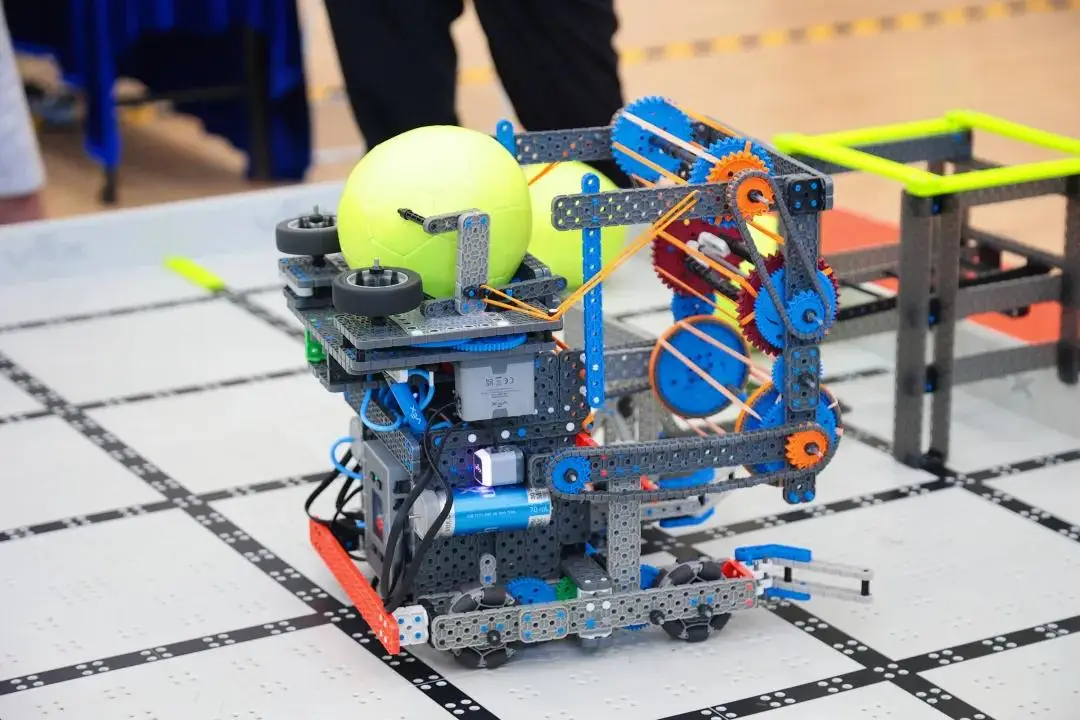
使用VEX IQ套装(如Super Kit)完成基础案例:
搭建叉车、机械臂,理解齿轮传动、连杆机构的稳定性与任务效率平衡。
通过图形化编程工具(如VEXcode IQ)学习电机控制、传感器读取(触碰/距离传感器),实现直线行驶、避障等基础动作。
二、进阶:技术深化与团队协作
机械结构优化
针对赛事任务设计专用模块:多自由度机械臂、万向轮底盘、快速切换工具。采用“模块化设计”,将机器人拆解为驱动、执行、传感器模块,便于快速调试。
编程逻辑升级
融合陀螺仪、编码器实现精准定位,用颜色传感器识别目标物。
编写分层程序:区分自动阶段、遥控阶段代码,加入故障容错机制(如程序卡顿自动重启)。
团队分工磨合
2人组队明确职责:1人主责机械调试,1人专注编程优化。模拟实战流程,记录机械卡顿、程序漏判等问题,针对性改进。
三、实战:从区域赛到经验积累
踏上赛场初体验
报名本地区域赛,熟悉场地灯光、裁判判罚标准(如任务完成度判定)。
赛后复盘:分析底盘打滑、传感器误判等问题,调整机械结构或程序参数。
技术创新与应急准备
尝试非传统方案:如橡皮筋辅助机械臂复位、无线编程实时调整参数(需确认赛事允许)。
制定“应急策略”:自动程序失败时,快速切换遥控模式补救。
抗压与时间管理
模拟限时拆装调试,训练高压下的反应能力。比赛日预留1小时检查设备,避免螺丝松动、电池电量不足等低级失误。
四、冲刺:精准打磨与状态固化
场地复刻与参数校准
根据州赛场地图纸,在训练区还原关键区域(如得分区障碍物),测试不同路径成功率。重新校准传感器阈值,适应比赛场地的灯光环境。
最终方案定型
确定轻量化底盘+双电机驱动等核心结构,固化自动任务分阶段执行程序(如移动→抓取→投放),不再做大改动。备份电机、传感器等易损件,确保突发故障可快速更换。
团队默契与展示优化
反复演练自动与遥控环节衔接,确保无缝切换。准备3分钟技术答辩,清晰阐述设计思路(如“为何选择履带式底盘应对复杂地形”),提升裁判印象分。
 Tags:
Tags: 所有标签Tag
所有标签Tag